Tutoriel TP Griffith
Mise en place générale
Brancher la clé USB/Blutooth sur l’ordinateur de travail
Récupérer les dossiers
Installation Partie Robot Griffith
Dans le dossier «Griffith», double cliquer sur robotRoverv3.py
Normalement Thonny s’ouvre, sinon faire ouvrir avec
Configurer le logiciel si besoin ou envie
Une fois le code complété, brancher le robot à une prise USB et l'allumer (led verte allumée)
Cliquer en bas à droite, trouver Raspberry Pi Pico, cliquer dessus
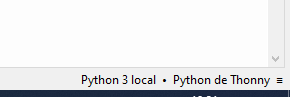

Cela signifie que le logiciel va travailler avec l’interpréteur de la carte du robot et pas celui de l’ordinateur.
Pour afficher l’arborescence, cliquer sur Affichage, Fichiers
En haut, on retrouve les fichiers sur le PC. En bas, les fichiers embarqués sur la Rasberry Pi Pico du robot. Attention ! seul un fichier nommé main.py sera eéecuté par la carte du robot.
Pour transférer le fichier du PC à la Carte Rasberry Pi Pico, cliquer sur
Fichier > enregistrer sous, choisir Rasberry Pi Pico, et écraser le main.py. (le nom du fichier change pour [main.py], ce fichier est sur le robot.
On peut débugger et vérifier que la syntaxe est OK en cliquant sur run (flèche verte) : si tout est ok, le robot clignote bleu et le shell indique ROBOT OK.
Installation Partie PC
Lancer Pycharm community edition
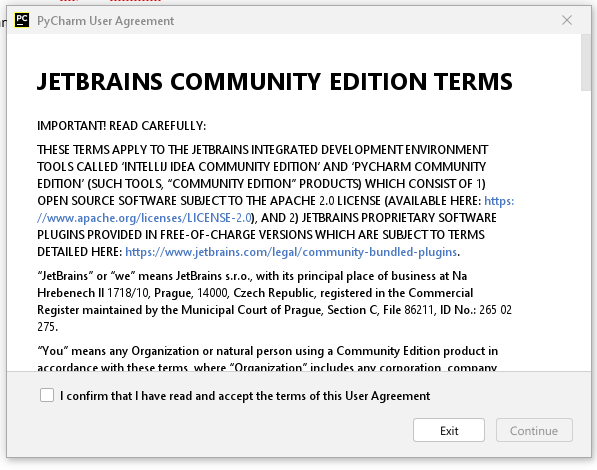
Cocher I confirm > continue
Don’t send
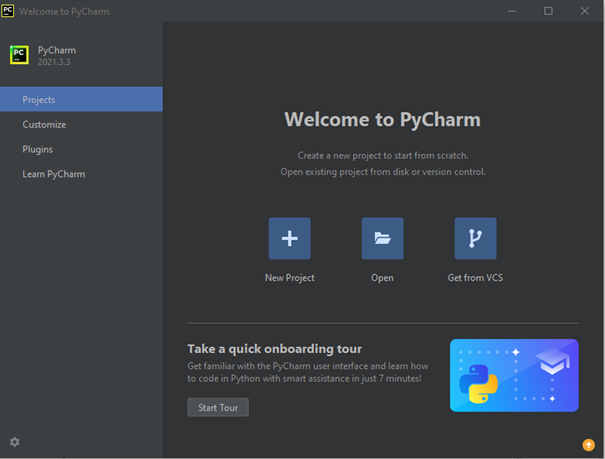
Cliquer sur New Project, indiquer la localisation du répertoire PC, vérifier les informations ci-dessous.
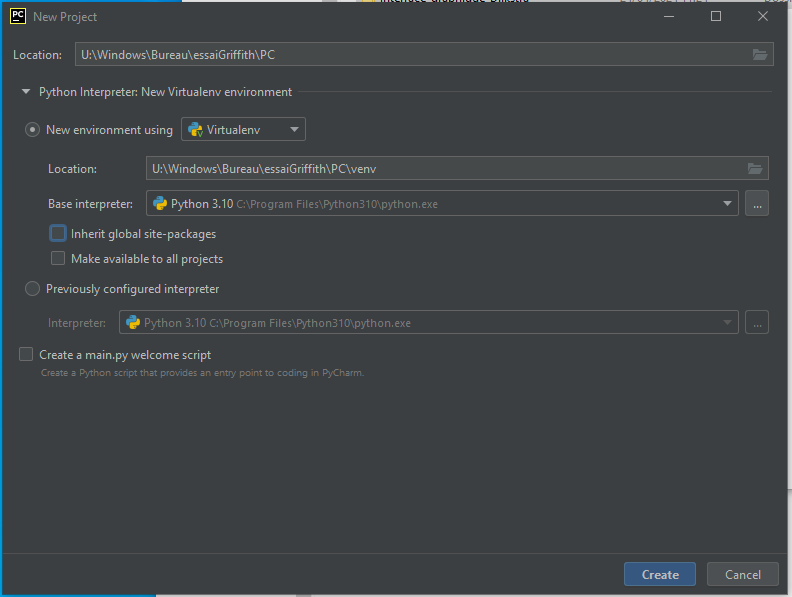
Cliquer sur Create.
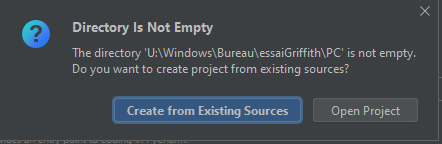
Cliquer sur "Create from Existing Sources"

Dans File> Settings, dans Projet : PC, dans Python Interpreter
Cliquer sur +, rechercher et installer serial et pyserial
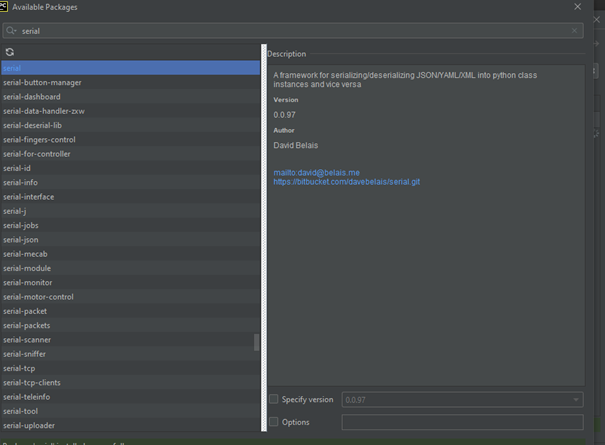
Fermer, ok
PARTIE test de bas niveau
Le test de bas niveau s'effectue en lançant le programme "commandes.py" sur Pycharm : lancer le programme en cliquant sur la flèche verte de RUN ou en cliquant droit sur le fichier, puis Run 'commandes'
On peut interagir en bas dans l'onglet de commande, soit directement, soit en complétant le parcours programmé, qu'on envoie via la commande p.
PARTIE DIJKSTRA
Après avoir complété l'ensemble des fichiers, lancer rover.py à une fenêtre de discussion s’ouvre.
Choisir le port, puis les points de départ et d’arrivée pour l’algorithme de Dijkstra.
Cliquer sur Calculer le Dijkstra pour lancer le calcul.
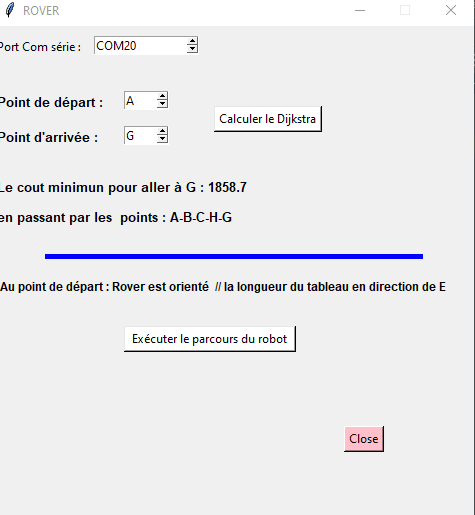
Cliquer sur Exécuter le
parcours du robot pour que le robot exécute le trajet en réel.